CK3M en CK5M
Programmeerbare meerassige controller
Besturing van meerdere assen met een snelste servocyclustijd van 50 µs/5 assen maakt nauwkeurige bewerking mogelijk
- Schaalbare motion controller CPU-reeks:
CK3M (1.0 GHz, 2-core), CK5M (1,6 GHz, 4-core) - Lokale assen voor nanoprecisie
- Ultrasnelle synchrone regeling (50 µs/5 assen)
- Aangepaste servo-regelingsalgoritmen
- Flexibiliteit bij het gebruik van actuatoren en encoders van meerdere leveranciers
- Flexibele programmering met de scripttalen G-code-, ANSI C- en PMAC
- EtherCAT voor flexibele configuratie
- Standaard TCP/IP Ethernet-communicatie
- Open protocollen: MQTT publisher/subscriber en OPC-UA-server, Ethernet IP-adapter en Modbus TCP Client/Server
- Modulair ontwerp en DIN-railmontage
Specificaties & bestelinfo
| Product | Type of module | CPU clock frequency | Max. number of axes via EtherCAT | Max. number of axis interface units | Amplifier interface | Encoder interface | Digital output type | Number of digital inputs | Number of digital outputs | Number of analog inputs | Beschrijving | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
CK3M Motion Control CPU | 1.0 GHz | 0 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, geen EtherCAT. Er kunnen maximaal twee asinterface-units worden aangesloten. Uitbreidingsmodules kunnen worden aangesloten. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 4 | 4 | 0 | 0 | 0 | CK3M-processor, 1 GB RAM, 1 GB Flash, 4 EtherCAT-assen. Er kunnen maximaal twee-as-aansturingseenheden worden aangesloten. Uitbreidingsunits kunnen worden aangesloten. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 8 | 4 | 0 | 0 | 0 | CK3M-processor, 1 GB RAM, 1 GB Flash, 8 EtherCAT-assen. Er kunnen maximaal twee-as-aansturingseenheden worden aangesloten. Uitbreidingsunits kunnen worden aangesloten. |
|
|||
|
|
Analog I/O | 4 | CK3W Analoog IN, 4 punten, +/-10 V, 16 bits (full scale) |
|
||||||||
|
|
Analog I/O | 8 | CK3W Analoog IN, 8 punten, +/-10 V, 16 bits (full scale) |
|
||||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | NPN | CK3W interface-eenheid met 4 assen, digitale encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | PNP | CK3W interface-eenheid met 4 assen, digitale encoder, DirectPWM, PNP |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | NPN | CK3W 4-assige interface-eenheid, DA-uitgang (gefilterde PWM), puls + richting- of faseverschil, pulsencoder / seriële encoder, NPN-uitvoering |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | PNP | CK3W 4-assige interface-eenheid, DA-uitgang (gefilterde PWM), puls + richting- of faseverschil, pulsencoder / seriële encoder, PNP-uitvoering |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | NPN | CK3W 4-assige interface-eenheid, DA-uitgang (echte DAC), puls + richting of faseverschil, Pulse-encoder / seriële encoder, NPN-uitvoering |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | PNP | CK3W interface unit met 4 assen, DA-uitgang (True DAC), puls en richting of faseverschil, pulsencoder/seriële encoder, PNP-uitgang |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | NPN | CK3W interface-eenheid met 4 assen, sinusvormige encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | PNP | CK3W 4-assige interface-eenheid, sinusvormige encoder, DirectPWM, PNP |
|
||||||
|
|
Encoder input | Not Applicable | Special Serial Protocol | Encoder-ingangseenheid voor CK3M, 4-kanaals seriële encoder, BISS-C, Endat2.2 en R88M-1Lx/-1Mx ingebouwde encoder |
|
|||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, XY2-100 | Laser-interface-units voor CK3M, XY2-100 Protocol, laser-PWM-uitgang |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, TCR, XY2-100 | Laser-interface-units voor CK3M, XY2-100 Protocol, laser-PWM-uitgang en TCR-uitgang |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100 | Laser-interface-units voor CK3M, SL2-100 Protocol, laser-PWM-uitgang |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100, TCR | Laser-interface-units voor CK3M, SL2-100 Protocol, laser-PWM-uitgang en TCR-uitgang |
|
||||||
|
|
Digital I/O | NPN | 16 | 16 | CK3W Digitale IO, 16 IN en 16 UIT: NPN |
|
||||||
|
|
Digital I/O | PNP | 16 | 16 | CK3W DIGITAL IO, IN/UIT:16/16, PNP |
|
Hulp nodig?
Wij zijn er om u te helpen! Neem contact met ons op en onze specialisten helpen u bij het vinden van de beste oplossing voor uw bedrijf.
Neem contact met mij op CK3M en CK5M

Dank u wel voor het insturen van uw verzoek. Wij informeren u zo snel als mogelijk.
Wij ondervinden technische problemen. Uw formulierinzending is niet gelukt. Onze verontschuldigingen hiervoor, probeer het later nog een keer. Details: [details]
DownloadOfferte voor CK3M en CK5M
Met dit formulier kunt u een prijsaanvraag doen voor de producten van uw keuze. Vul alstublieft alle velden in die gemarkeerd zijn met *. Uw persoonlijke gegevens behandelen wij uiteraard volstrekt vertrouwelijk.
Dank u wel voor uw aanvraag. Wij zenden u de gewenste informatie zo snel als mogelijk.
Wij ondervinden technische problemen. Uw formulierinzending is niet gelukt. Onze verontschuldigingen hiervoor, probeer het later nog een keer. Details: [details]
DownloadKenmerken

Modulair ontwerp
Dankzij het modulaire ontwerp kunt u de CK3M of CK5M naar wens combineren
CK3M versus CK5M
Zowel CK3M als CK5M zijn geavanceerde motion controllers met identieke functionaliteit. Het belangrijkste verschil ligt in hun core processors: De CK3M heeft een 1.0 GHz dual-core processor, terwijl de CK5M is uitgerust met een krachtigere 1.6 GHz quad-core processor.
| Max. lokale assen | Max. EtherCAT-assen | |
|---|---|---|
| CK3M | 16 | 8 |
| CK5M | 32 | 32 |
Power PMAC IDE (geïntegreerde ontwikkelomgeving)
- Gebaseerd op Microsoft® Visual Studio®
- Scripttalen G-code, ANSI C en PMAC
- Eenvoudige tuning
- Eenvoudig instellen
- Problemen oplossen
- Foutopsporing
Complexe kinematica
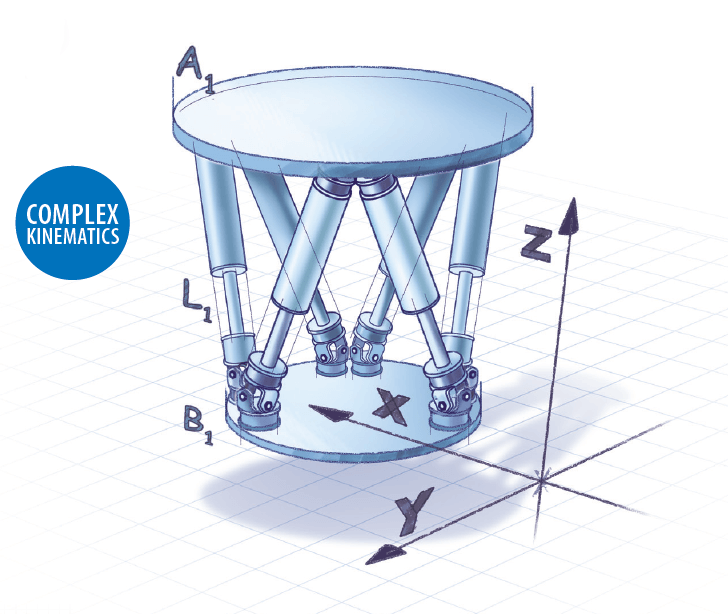
Complexe mechanica kan worden bestuurd dankzij de matrix handling en space conversion. Speciale toepassingen zoals de telescoopspiegelpositionering met een Hexapod, kunnen gemakkelijk worden uitgevoerd door de functionaliteit voor kinematica-afhandeling.
Nuttige functies voor toepassingen in nauwkeurige machinebewerkingen
G-code
Standaard RS-274 G-code-interpreter. De gebruiker kan subprocedures schrijven voor de aangepaste implementatie van G-, M-, T- en D-codes. Flexibiliteit om de syntax aan te passen en te werken in combinatie met CAD/CAM-software.
Freescompensatie 2D/3D
Gereedschapsdiameter en vormcompensatie, die exact overeenkomen met het freespunt dat in de G-code is gespecificeerd.
Snelle processor + grote programmabuffer
De snelle processor kan meer dan 10.000 blokken per seconde verwerken en maximaal 1 GB aan werkstukprogramma's.
Terugtracering van blokken om het pad om te keren
Het pad kan worden omgekeerd om het gereedschap uit het freesgebied te halen.
Geavanceerde blokvoorspelling
Instructies in de buffer worden vooraf geanalyseerd, bewegingen worden gecombineerd en geoptimaliseerd qua snelheid en acceleratie. Dit alles zorgt voor betere prestaties.
Beheer van gereedschap dat onder een hoek staat
Gereedschappen met een freesrichting vereisen een positionering met een pad onder een hoek.
Software
Power PMAC IDE
Deze computersoftware wordt gebruikt voor het configureren en aanmaken van gebruikersprogramma's, en het oplossen van fouten in de programma's voor de NY51-A en CK3E programmeerbare controllers voor meerdere assen.
Verwante producten
-

Universele Sysmac-servoaandrijving
-

Precisiebesturing voor een breed scala aan motortoepassingen
-

CK3E programmeerbare controller voor meerdere assen
-

Prestaties en bruikbaarheid voor machinebesturing
Downloads









_getting_started_guide_en.jpg)