
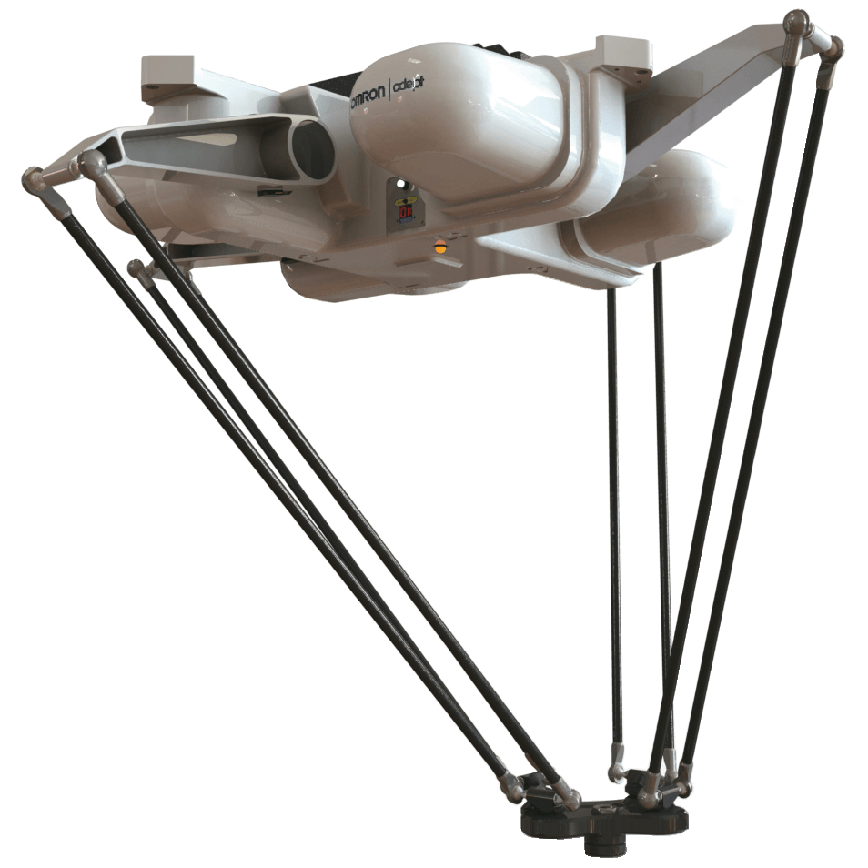
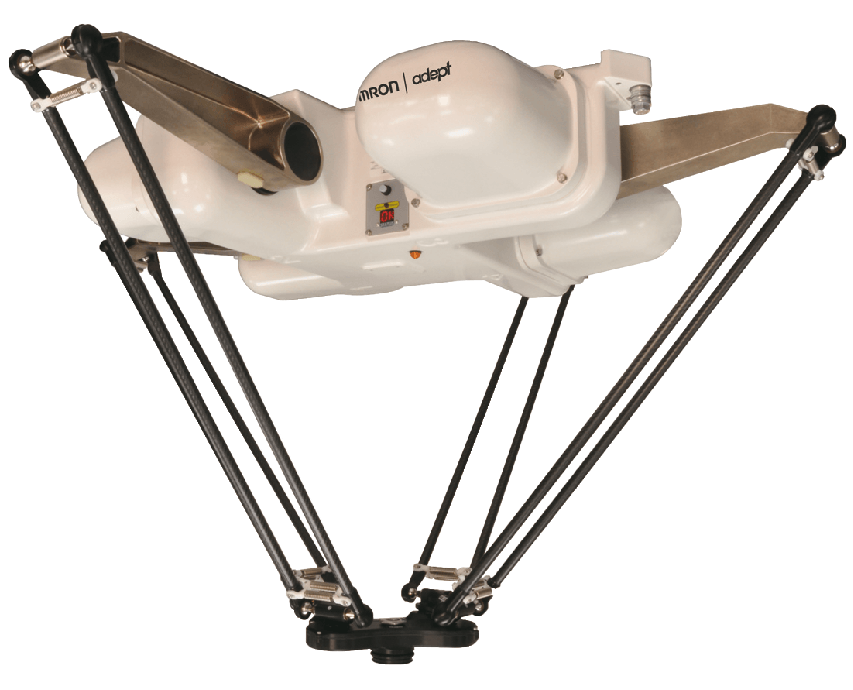
Quattro
Parallelle robot met 4 assen bereikt hoge snelheid en hoge nauwkeurigheid
- Ethernet-ondersteuning voor de regeling van de robot via de bekende programmeertaal (IEC 61131-3) van de NX/NJ-machinecontroller
- Arm met vier assen verdeelt de last gelijkmatig over de robot
- Snel en zeer nauwkeurig transport en assemblage
- Ontworpen met een hoge payload voor het ondersteunen van multi-hand (multi-picking)
- Het 650HS-model is door het Amerikaanse Ministerie van Landbouw (USDA) goedgekeurd voor intern transport van primaire levensmiddelen
- 1300 en 1600 werkbereikmodellen
- Max. payload van 15 kg
- Beschermingsklasse IP65 (IP66 voor HS-model)
Specificaties & bestelinfo
| Product | Payload | Reach | Robot controller | Z-Stroke | Degree of protection (IP) | Rotation -/+ | Platform type | Beschrijving | |
|---|---|---|---|---|---|---|---|---|---|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Robot Quattro ePLC650H P30 (uitbreiding), 0º-rotatie, 15 kg payload, diameter bereik 1300 mm, 500 mm Z-as, IP20-basis, IP67-gereedschap |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Robot Quattro ePLC650H P31 (uitbreiding), 46,25º-rotatie, 6 kg payload, diameter bereik 1300 mm, 500 mm Z-as, IP20-basis, IP67-gereedschap |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Robot Quattro ePLC650H P32 (uitbreiding), 92,5º-rotatie, 6 kg payload, diameter bereik 1300 mm, 500 mm Z-as, IP20-basis, IP67-gereedschap |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Robot Quattro ePLC650H P34 (uitbreiding), 185º-rotatie, 6 kg payload, diameter bereik 1300 mm, 500 mm Z-as, IP20-basis, IP67-gereedschap |
|
|
|
8 kg | 650 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Robot Quattro ePLC650HS P30 (uitbreiding), 0º-rotatie, 15 kg payload, diameter bereik 1300 mm, 500 mm Z-as, IP66-basis, IP67-gereedschap, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Robot Quattro ePLC650HS P31 (uitbreiding), 46,25º-rotatie, 6 kg payload, diameter bereik 1300 mm, 500 mm Z-as, IP66-basis, IP67-gereedschap, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Robot Quattro ePLC650HS P32 (uitbreiding), 92,5º-rotatie, 6 kg payload, diameter bereik 1300 mm, 500 mm Z-as, IP66-basis, IP67-gereedschap, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Robot Quattro ePLC650HS P34 (uitbreiding), 185º-rotatie, 6 kg payload, diameter bereik 1300 mm, 500 mm Z-as, IP66-basis, IP67-gereedschap, USDA |
|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP65 | 0 ° | P30 | Quattro 650H, IP65, P30, uitbreiding |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 46.25 ° | P31 | Quattro 650H, IP65, P31, uitbreiding |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 92.5 ° | P32 | Quattro 650H, IP65, P32, uitbreiding |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 185 ° | P34 | Quattro 650H, IP65, P34, uitbreiding |
|
|
|
10 kg | 800 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Robot Quattro ePLC800H P30 (uitbreiding), 0º-rotatie, 10 kg payload, diameter bereik 1600 mm, 500 mm Z-as, IP65-basis, IP67-gereedschap |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Robot Quattro ePLC800H P31 (uitbreiding), 46,25º-rotatie, 4 kg payload, diameter bereik 1600 mm, 500 mm Z-as, IP65-basis, IP67-gereedschap |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Robot Quattro ePLC800H P32 (uitbreiding), 92,5º-rotatie, 4 kg payload, diameter bereik 1600 mm, 500 mm Z-as, IP65-basis, IP67-gereedschap |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Robot Quattro ePLC800H P34 (uitbreiding), 185º-rotatie, 4 kg payload, diameter bereik 1600 mm, 500 mm Z-as, IP65-basis, IP67-gereedschap |
|
|
|
7 kg | 800 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Quattro 800HS, USDA, P30, uitbreiding |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Quattro 800HS, USDA, P31, uitbreiding |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Quattro 800HS, USDA, P32, uitbreiding |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Quattro 800HS, USDA, P34, uitbreiding |
|
Accessoires
Ordering information
| Apperance | Type | Name/Specifications | Order code |
|---|---|---|---|
 |
Robot Integrated Controller | 16 motion axis, up to 8 robots control | NJ501-R300 |
| 32 motion axis, up to 8 robots control | NJ501-R400 | ||
| 64 motion axis, up to 8 robots control | NJ501-R500 | ||
 |
Robot Controller | SmartController EX | 19200-000 |
| SmartController EX + Front Panel | 19300-000 | ||
 |
Pendant | T20 Pendant with 10 m Cable | 10046-010 |
| T20 Pendant-Jumper Plug | 10048-000 | ||
| T20 Pendant Wall Bracket | 10079-000 | ||
| T20 Adapter Cable, 3 m | 10051-003 | ||
 |
Vision Controller | IPC Application Controller | AC1-152000 |
 |
Camera | GigE PoE, 1602 x 1202 pixels, 60 fps, Monochrome, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-250 |
| GigE PoE, 1602 x 1202 pixels, 60 fps, Color, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-251 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Monochrome, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-300 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Color, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-301 | ||
| Belt Encoder (Conveyor-Tracking) |
Encoder Kit IP65 | 09742-001 | |
| Y-Adapter Cable, 3 m | 09443-000 | ||
| Encoder Extension Cable, 5 m | 09446-050 | ||
| SCEX-BELT,Y-Adapter Cable, 0.5 m | 09550-000 | ||
| XBELTIO Cable, 0.6 m | 13463-000 | ||
| Additional I/O Options | IO Blox (connect to robot), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30200 | |
| IO Block (connect to previous IO Blox), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30100 | ||
| IO Blox-to-robot Cable, 3 m | 04677-030 | ||
| IO Blox-to-IO Blox Cable, 3 m | 04679-030 | ||
| IO Blox-to-IO Blox Cable, 0.3 m | 04679-003 | ||
| XIO Termination Block, 12 inputs/8 outputs, cables included (1.8 m) | 90356-40100 | ||
| XDIO Termination Block, 50 pin, cables included (2 m) | 09747-000 | ||
 |
Front Panel | Front Panel with 3 m cable | 90356-10358 |
| Front Panel Cable, 3 m | 10356-10500 | ||
| Power Supply/Cable | AC Power Cable, 5 m | 04118-000 | |
| 24 VDC Power Cable, 5 m | 04120-000 | ||
| 24 VDC, 6.5 A, 150 W (Front Mounting), Power Supply | S8FS-G15024C
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 24 VDC, 6.5 A, 150 W (DIN-Rail Mounting), Power Supply | S8FS-G15024CD
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 1394 Cable, 4.5 m | 13632-045 | ||
| eAIB XSYSTEM Cable Assembly, 1.8 m | 13323-000 | ||
| DB9 Splitter, 0.3 m | 00411-000 | ||
| eAIB XSYS Cable, 4.5 m | 11585-000 | ||
| Ethernet Cable | XS6W-6LSZH8SS
2
Refer
to the Industrial Ethernet Cables Catalog (Cat.No.G019) for details. |
||
| Industrial Switching Hubs | W4S1-05C
2
Refer
to the Industrial Switching Hubs Catalog (Cat.No.V227) for details. |
||
| Solenoid Valve Kit | eCobra robots (600, 800, 800 Inverted) | 02853-000 | |
| Cable Seal Kit | Hornet 565 IP65/67, Quattro 650HS IP65/67, Quattro 800HS IP65/67 | 08765-000 | |
| Quattro 650HS Standard, Quattro 800HS Standard | 09564-000 | ||
| eCobra 800 IP65/67 | 04813-000 | ||
| eCobra 800 Inverted IP65 | 09073-000 | ||
 |
ACE License | Automation Control Environment (for ACE 4.x) | Please download it from following URL: http://www.adept.com/Robots-Tool |
| ACE PackXpert (for ACE 4.x) | 20409-000 | ||
| ACE Sight Vision Software (for ACE 4.x) | 20410-000 | ||
| ACE PackXpert with ACE Sight Vision (for ACE 4.x) This license contains an ACE PackXpert license and an ACE Sight license. |
20433-000 | ||
 |
Related Products | Machine Automation Controller NX/NY/NJ Series | NX/NY/NJ
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
| Automation Software Sysmac Studio | SYSMAC-SE2
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
||
| Collection of software functional componentsSysmac LibraryAdept Robot Control Library | SYSMAC-XR009
2
Refer
to the Sysmac Library Catalog (Cat.No.P106) for details. |
||
| Sysmac Studio 3D Simulation option | SYSMAC-SA4 |
||
Contact your Omron representative for lenses, lights, and licenses.
Sysmac Library
![]()
The Sysmac Library is a collection of software functional components that can be used in programs
for the NX/NY/NJ Machine Automation Controllers.Please download it from following URL and install to Sysmac Studio Automation Software.http://www.ia.omron.com/sysmac_library/The Adept Robot Control Library allows you to control Delta, Articulated and SCARA robots manufactured
by Omron Adept Technologies Inc. from the NX/NY/NJ Machine Automation Controller by using the same
instructions and programming methods.
Hulp nodig?
Wij zijn er om u te helpen! Neem contact met ons op en onze specialisten helpen u bij het vinden van de beste oplossing voor uw bedrijf.
Neem contact met mij op Quattro

Dank u wel voor het insturen van uw verzoek. Wij informeren u zo snel als mogelijk.
Wij ondervinden technische problemen. Uw formulierinzending is niet gelukt. Onze verontschuldigingen hiervoor, probeer het later nog een keer. Details: [details]
Offerte voor Quattro
Met dit formulier kunt u een prijsaanvraag doen voor de producten van uw keuze. Vul alstublieft alle velden in die gemarkeerd zijn met *. Uw persoonlijke gegevens behandelen wij uiteraard volstrekt vertrouwelijk.
Dank u wel voor uw aanvraag. Wij zenden u de gewenste informatie zo snel als mogelijk.
Wij ondervinden technische problemen. Uw formulierinzending is niet gelukt. Onze verontschuldigingen hiervoor, probeer het later nog een keer. Details: [details]
Delta-robotseries
Quattro 800H
- Nominaal werkbereik: Ø 1600 x 215 mm (max. 500 mm)
- Max. payload-bereik: 4 tot 10 kg
- Aantal assen: 4
- IP65 (met optionele kabelafdichtset)
Quattro 650H/HS
- Nominaal werkbereik: Ø 1300 x 215 mm (max. 500 mm)
- Max. payload-bereik: 3 tot 15 kg
- Aantal assen: 4
- IP65 (met optionele kabelafdichtset), IP66 HS-model
- De Quattro 650HS is door het Amerikaanse Ministerie van Landbouw (USDA) goedgekeurd voor intern transport van primaire levensmiddelen
Besturingen
Video's

-

Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.
01:21
Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.Verwante producten
-

Parallelle robot, ideaal voor gebruik in de voedsel- en drankenindustrie, de farmaceutische industrie en de gezondheidszorg
-

Parallelle robot, ideaal voor gebruik in de voedsel- en drankenindustrie, de farmaceutische industrie en de gezondheidszorg
-

Parallelle robot met 4 assen bereikt hoge snelheid en hoge nauwkeurigheid
Downloads







_getting_started_guide_en.jpg)


_users_manual_en.jpg)














